1,000 lbs. Machine Screw Jacks
WJ1000
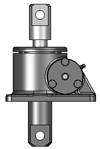
Joyce WJ1000 miniature worm gear machine screw jacks with 5:1 gear set ratios lift and precisely position up to 1000 pounds. Upright or inverted, these self-locking jacks operate at full capacity in tension or compression and are available in Translating, Keyed for non-rotation and KFTN designs.
- 5/8” diameter lifting screw
- Standard lead, 0.125” Stub Acme
- Screw material – 304 stainless steel
- Self-locking
- Hand wheels are available for manual operation.
These jacks can be attached to small foot mounted motors with Couplings for powered operation.
When a motor mount is needed consider Integrated Actuators, which include a 56C motor mount on the actuator housing.
2D/3D Models
Product Media

Available Models
- Aluminum housing and protection tube
- Lifting screw, 304 stainless steel
- Input shaft (worm), 416 Stainless steel
Sample Part Number:
Click on the part number to reveal additional informaton about jack designs and shaft codes.
Model Number
| Miniature | 1-Ton | 2-Ton | 2-Ton Reverse Base | 3-Ton | 5-Ton | 10-Ton | 15-Ton | 20-Ton |
|---|---|---|---|---|---|---|---|---|
| WJ250 WJ500* WJ1000 |
WJ51 WJ201 |
WJT62 WJT122 WJT242 WJT252 |
RWJT62 RWJT122 RWJT242 RWJT252 |
WJ63 WJ123 WJ243 WJ253 |
WJT65 WJT125 WJT245 WJT255 |
WJ810 WJ2410 WJ2510 |
WJ815 WJ2415 WJ2515 |
WJ820 WJ2420 WJ2520 |
| DWJ62* DWJ122* DWJ242* |
DRWJ62* DRWJ122* DRWJ242* |
DWJ63* DWJ123* DWJ243* |
DWJ65* DWJ125* DWJ245* |
DWJ810* DWJ2410* |
DWJ815* DWJ2415* |
DWJ820* DWJ2420* |
||
| 25-Ton | 30-Ton | 35-Ton | 50-Ton | 50-Ton Reverse Base | 75-Ton | 100-Ton | 150-Ton | 250-Ton |
| WJ1125 WJ3225 |
WJ1130 WJ3230 |
WJ1135 WJ3235 |
WJT1150 WJT3250 |
RWJT1150 RWJT3250 |
WJ1175 WJ3275 |
WJ12100 WJ36100 |
WJ12150 WJ36150 |
WJ50250 |
| DWJ1125* DWJ3225* |
DWJ1130* DWJ3230* |
Important Note: *Not self-locking, may lower under load. Brake motors or external locking systems are recommended.
D: Double Lead Screw
R: Reverse Base Jack, (only available on 2-ton and 50-ton jacks).
Jack Configuration
 |
 |
|
U=Upright |
I=Inverted |
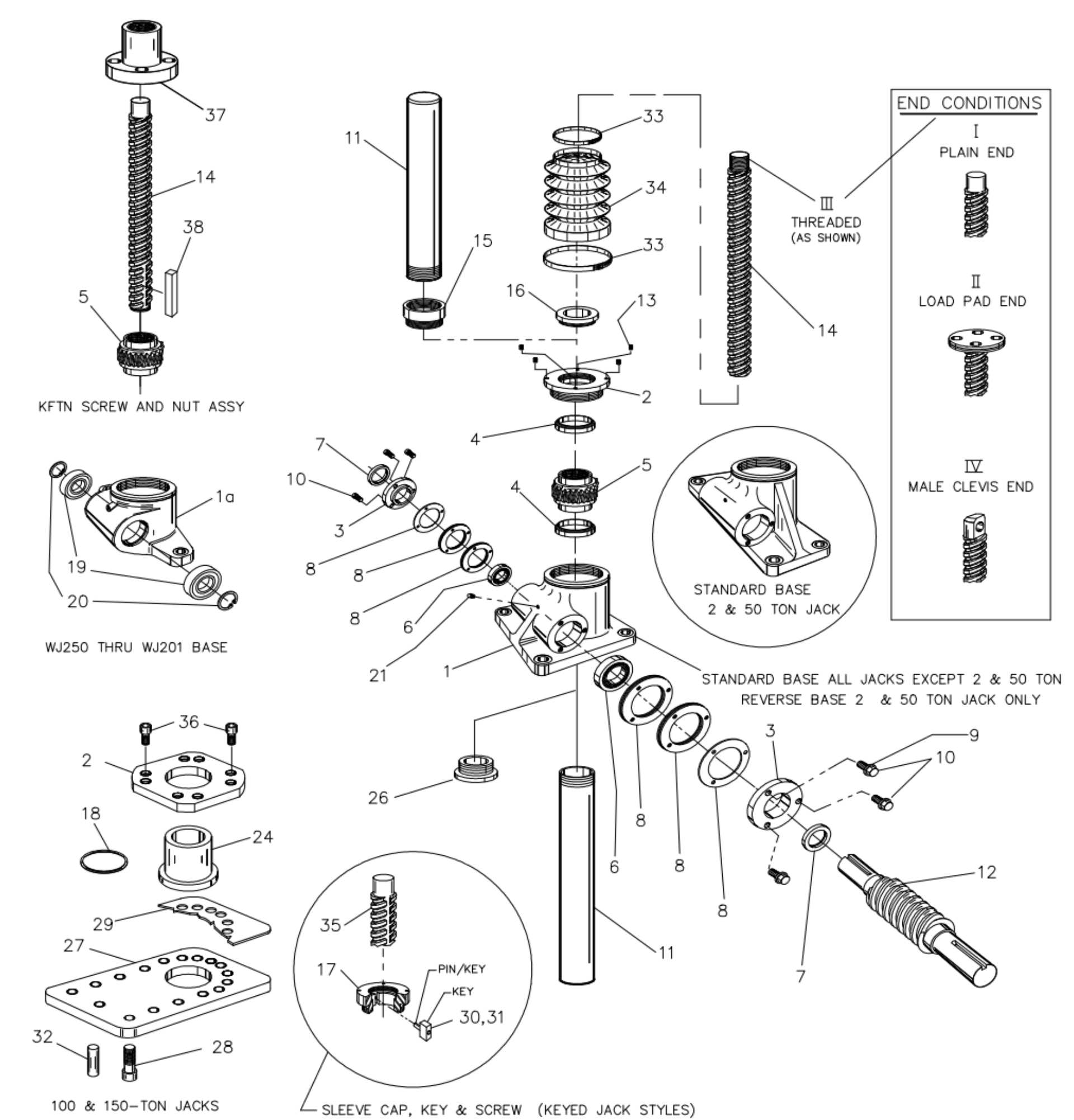
End Conditions
 |
 |
 |
 |
|
1=T1 |
2=T2 |
3=T3 |
4=T4 |
Jack Designs
 |
 |
 |
 |
|
|
S=Translating |
K=Keyed for Non Rotation |
N=Traveling Nut |
D=Double Clevis |
R=KFTN Trunnion* |
* Standard trunnion mounts available on 2-ton through 20-ton jacks.
Machine Screw Jack Rise
Rise is travel expressed in inches and not the actual screw length.
Left Side Shaft Code |
Right Side Shaft Code |
|
XXXX=Remove |
XXXX=Remove |
{kind=link}
Optional Shaft Codes
Screw Stops and Boots
Screw stops are optional on machine screw jacks. When specified, the closed height of the jack and/or the protection tube length may be increased. When boots are added to machine screw jacks, the closed height of the jack may be increased.
Mechanical Counters
CNT0=0.001" Increments
Note: Contact Joyce/Dayton for availability and options.
Hand Wheels
HW04=4" dia
HW06=6" dia
HW08=8" dia
HW10=10" dia
HW12=12" dia
Geared Potentiometers
POTA=0-10V (IP65)
POTB=4-20MA (IP65)
POTC=0-10V w/2 switches*
POTD=4-20MA w/2 switches*
*Optional IP65 rating available
Encoders and Electronic Liit Switches
ENCX=Encoder
ELS2=2 Position Electronic Switch
ELS4=4 Position Electronic Switch
ELS6=6 Position Electronic Switch
Motor for Systems and Direct Drives
- All standard motors are 3-phase, 208-230/460 VAC or 230/460 VAC. Other motor options are available. Specify the appropriate motor size from the chart on the right.
- Refer to the "Additional Options" chart on the preceding page as needed.
- Brake motors (M2) are recommended for jacks that are not self-locking, and jacks with double lead screws.
- If the motor frequency will be varied to provide a "soft" start an inverter duty motor may be required.
Motors
| Size | Code |
|---|---|
| 1/4 HP | K |
| 1/3 HP | A |
| 1/2 HP | B |
| 3/4 HP | C |
| 1 HP | D |
| 1-1/2 HP | E |
| 2 HP | F |
| 3 HP | L |
| 5 HP | G |
| 7-1/2 HP | H |
| 10 HP | I |
| 15 HP | J |
Motor Mounts
Ordering Example:
MMA A (Motor code from chart above)
MMA=56C
MMB=140TC
MMC=180TC
MMD=210TC
Standard motor adapters are aluminum
Mechanical Limit Switches
Ordering Example:
LA (Models) 1(Number of DPDT Switches) 3(Available Positions)
| Model | Code | Available Positions | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| LS7-402 | LI |
Number of DPDT Switches NOTE: Will always be 0 for LS7 models |
1 | 2* | 3 | 4 | 5 | 6* | 7 | 8 | |
| LS8-402 | LA | Left Side Shaft Options |  |
 |
 |
 |
 |
 |
 |
 |
|
| LS8-504 | LB | ||||||||||
| LS9-502 | LC | ||||||||||
| LS9-503 | LD | Right Side Shaft Options |  |
 |
 |
 |
 |
 |
 |
 |
|
| LS9-504 | LE | ||||||||||
| LS9-505 | LF | ||||||||||
| LS9-506 | LG |
*These positions are not standard. Contact Joyce/Dayton with your requirements. |
|||||||||
| LS9-507 | LH | ||||||||||
Additional Options
- X=Standard Jack, no additional options
- S=Additional Specification Required (comment as necessary)
Anti-Backlash
- A=Split Nut
- A90=A90 Design
- A95=A95 Design
Protective Boots
- B=Protective Boot
- D=Dual Protective Boot
Finishes
- F1=Do Not Paint
- F2=Epoxy Paint
- F3=Outdoor Paint Process
Motor Options
- M1=Less Motor
- M2=Brake Motor
- M3=Single Phase Motor (120VAC)
- M4=50Hz Motor
Grease/Seals
- H1=High Temperature Operation
- H2=Food Grade
Screw Stops
- ST0=Extending
- ST1=Retracting
- ST2=Both
- Specify as many options as needed
| MODEL | SCRW DIAM (INCH) | THRD PITCH/ LEAD | WORM GEAR RATIO | WORM SHAFT TURNS FOR 1" TRAVEL | TARE TORQUE (INCH LBS.) | STARTING TORQUE (INCH LBS.) | OPERATING TORQUE (INCH LBS.) | EFFICIENCY RATING % APPROX. |
SCREW TORQUE (INCH LBS.) | BASIC JACK WEIGHT (LBS). | JACK WEIGHT PER INCH TRAVEL (LBS.) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| WJ1000 | 5/8 | .125 pitch STUB ACME |
5:1 | 40 | 1 | .030W* | .021W* @ 500 RPM | 19.9 | .059W* | 6 | 0.1 |
Note: Optional hand wheels are available but, due to the housing design, it is not possible to mount a motor, encoder, potentiometer, or counter directly to the jack housing. When a motor mount is needed consider Integrated Actuators, which include a 56C motor mount on the actuator housing.
(R): Reverse Base Jack.
*W: Load in pounds.
Tare Torque: Initial torque to overcome seal and normal assembly drag. (This value must be added to starting torque or operating torque values.)
Starting Torque: Torque value required to start moving a given load (dissipates to operating torque values once the load begins moving).
Operating Torque: Torque required to continuously raise a given load at the input RPM listed. NOTE: If your actual input RPM is 20% higher or lower than the listed RPM, please refer to our JAX program to determine actual torque values at your RPM.
Screw Torque: Torque required to resist screw rotation (Translating Design Jacks) and traveling nut rotation (Keyed for Traveling Nut Design Jacks).
Lead: The distance traveled axially in one rotation of the lifting screw.
Pitch: The distance from a point on a screw thread to a corresponding point on the next thread, measured axially.