Metric Screw Jacks 10kN
MWJ51, MWJ201
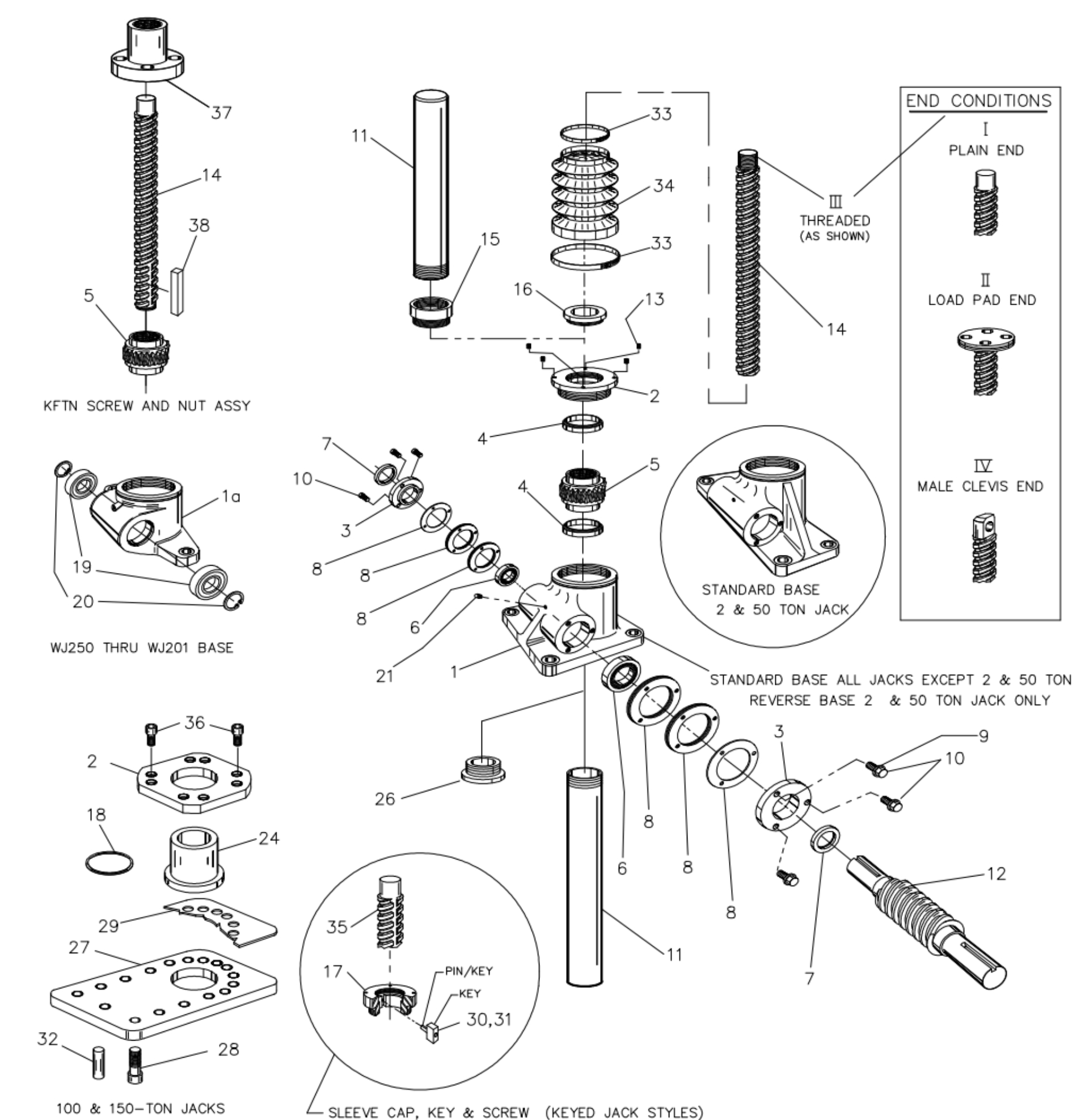
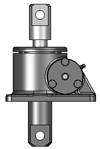
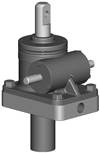
Joyce 10 kN metric screw jacks are specifically designed for applications that must be fully metric. Upright or inverted these jacks operate at full capacity in tension or compression and are available in Translating, Keyed for non-rotation, and KFTN designs.
- Self-locking 20mm diameter, 5 mm pitch trapezoidal lifting screw
- Fully metric mounting hole locations, diameters, and fasteners
- Joyce/Dayton can customize to your specifications
2D/3D Models
Product Media

Available Models
- Housing and protection tube are aluminum
- Lifting screw is cold drawn steel (CDS)
- Input shaft (worm) is cold drawn steel (CDS)
Sample Part Number:
Click on the part number to reveal additional informaton about jack designs and shaft codes.
Model Number
| 10 kN | 25 kN | 50 kN | 100 kN |
|---|---|---|---|
| MWJ51 MWJ201 |
MWJ62.5 MWJ122.5 MWJ242.5 |
MWJ65 MWJ125 MWJ245 |
MWJ810 MWJ2410 |
Jack Configuration
 |
 |
|
U=Upright |
I=Inverted |
End Conditions
 |
 |
 |
 |
|
1=T1 |
2=T2 |
3=T3 |
4=T4 |
Jack Designs
 |
 |
 |
 |
|
|
S=Translating |
K=Keyed for Non Rotation |
N=Traveling Nut |
D=Double Clevis |
R=KFTN Trunnion* |
* Standard trunnion mounts available on 2-ton through 20-ton jacks.
Metric Screw Jack Rise
Rise is travel expressed in inches and not the actual screw length.
Left Side Shaft Code |
Right Side Shaft Code |
|
XXXX=Remove |
XXXX=Remove |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Optional Shaft Codes
Screw Stops and Boots
Screw stops are optional on metric screw jacks. When specified, the closed height of the jack and/or the protection tube length may be increased. When boots are added to metric screw jacks, the closed height of the jack may be increased.
Mechanical Counters
CNT0=0.001" Increments
Note: Contact Joyce/Dayton for availability and options.
Hand Wheels
HW04=4" dia
HW06=6" dia
HW08=8" dia
HW10=10" dia
HW12=12" dia
Geared Potentiometers
POTA=0-10V (IP65)
POTB=4-20MA (IP65)
POTC=0-10V w/2 switches*
POTD=4-20MA w/2 switches*
*Optional IP65 rating available
Encoders and Electronic Limit Switches
ENCX=Encoder
ELS2=2 Position Electronic Switch
ELS4=4 Position Electronic Switch
ELS6=6 Position Electronic Switch
Motor for Systems and Direct Drive
- All standard motors are 3-phase, 208-230/460 VAC or 230/460 VAC. Other motor options are available. Specify the appropriate motor size from the chart on the right.
- Refer to the "Additional Options" chart on the preceding page as needed.
- Brake motors (M2) are recommended for jacks that are not self-locking, and jacks with double lead screws.
- If the motor frequency will be varied to provide a "soft" start an inverter duty motor may be required.
Motors
| Size | Code |
|---|---|
| 1/4 HP | K |
| 1/3 HP | A |
| 1/2 HP | B |
| 3/4 HP | C |
| 1 HP | D |
| 1-1/2 HP | E |
| 2 HP | F |
| 3 HP | L |
| 5 HP | G |
| 7-1/2 HP | H |
| 10 HP | I |
| 15 HP | J |
Motor Mounts
Ordering Example:
MMA A (Motor code from chart above)
MMA=56C
MMB=140TC
MMC=180TC
MMD=210TC
Standard motor adapters are aluminum
Mechanical Limit Switches
Ordering Example:
LA (Models) 1(Number of DPDT Switches) 3(Available Positions)
| Model | Code | Available Positions | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| LS7-402 | LI |
Number of DPDT Switches NOTE: Will always be 0 for LS7 models |
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| LS8-402 | LA | Left Side Shaft Options |  |
 |
 |
 |
 |
 |
 |
 |
|
| LS8-504 | LB | ||||||||||
| LS9-502 | LC | ||||||||||
| LS9-503 | LD | Right Side Shaft Options |  |
 |
 |
 |
 |
 |
 |
 |
|
| LS9-504 | LE | ||||||||||
| LS9-505 | LF | ||||||||||
| LS9-506 | LG |
These positions are not standard. Contact Joyce/Dayton with your requirements. |
|||||||||
| LS9-507 | LH | ||||||||||
Additional Options
- X=Standard Jack, no additional options
- S=Additional Specification Required (comment as necessary)
Anti-Backlash
- A=Split Nut
- A90=A90 Design
- A95=A95 Design
Protective Boots
- B=Protective Boot
- D=Dual Protective Boot
Finishes
- F1=Do Not Paint
- F2=Epoxy Paint
- F3=Outdoor Paint Process
Motor Options
- M1=Less Motor
- M2=Brake Motor
- M3=Single Phase Motor (120VAC)
- M4=50Hz Motor
Grease/Seals
- H1=High Temperature Operation
- H2=Food Grade
Screw Stops
- ST0=Extending
- ST1=Retracting
- ST2=Both
- Specify as many options as needed
| Model | Capacity | Screw Diameter (mm) | Thread Pitch/Lead | Worm Gear Ratio | Worm Shaft Turns for 1mm Travel | Tare Torque (Nm) | Starting Torque (Nm) | Operating Torque (Nm) | Efficiency Rating % Approx | Screw Torque (Nm) | Basic Jack Weight (Kg) | Jack Weight (Kg) per 25mm Travel |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MWJ51 | 10 kN | 20 | 5mm | 5:1 | 1 | 0.33 | .95W* | .70W* @ 500 RPM |
22.7 | 2W* | 2.7 | 0.14 |
| MWJ201 | 10 kN | 20 | 5mm | 20:1 | 4 | 0.33 | .41W* | .23W* @ 500 RPM |
17.0 | 2W* | 2.7 | 0.14 |
*W: Load in kN.
Tare Torque: Initial torque to overcome seal and normal assembly drag. This value must be added to starting torque or operating torque values.
Starting Torque: Torque value required to start moving a given load (dissipates to operating torque values once the load begins moving).
Operating Torque: Torque required to continuously raise a given load at the input RPM listed. Note: If your actual input RPM is 20% higher or lower than the listed RPM, please refer to our JAX program to determine actual torque values at your RPM.
Screw Torque: Torque required to resist screw rotation (Translating Design Jacks) and traveling nut rotation (Keyed for Traveling Nut Design Jack).
Lead: The distance traveled axially in one rotation of the lifting screw.
Pitch: The distance from a point on a screw thread to a corresponding point on the next thread measured axially.